| Новые программы oszone.net |
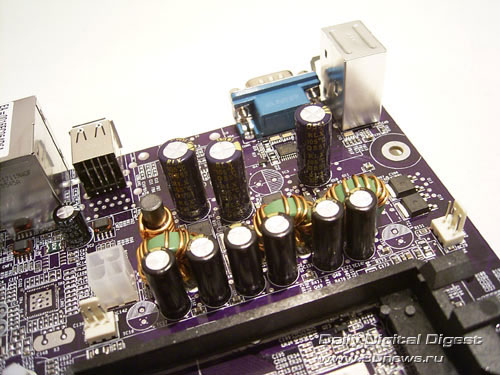
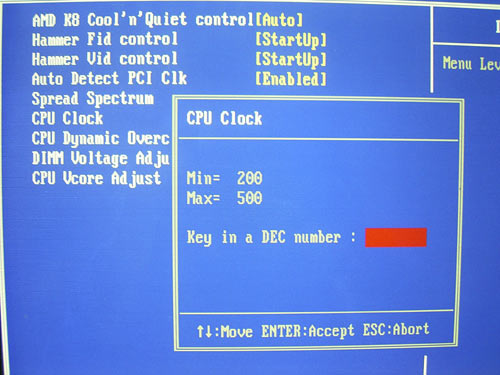
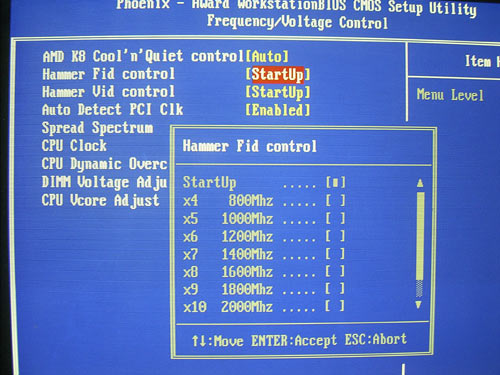
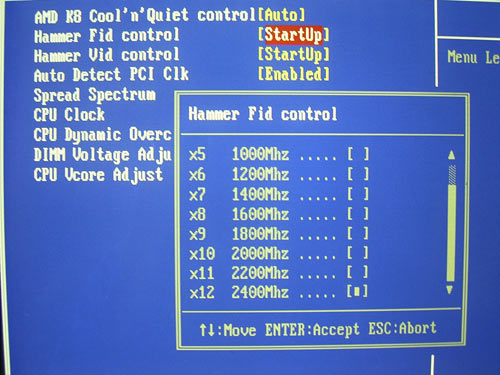
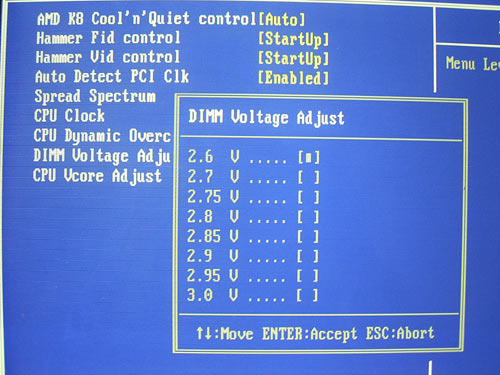
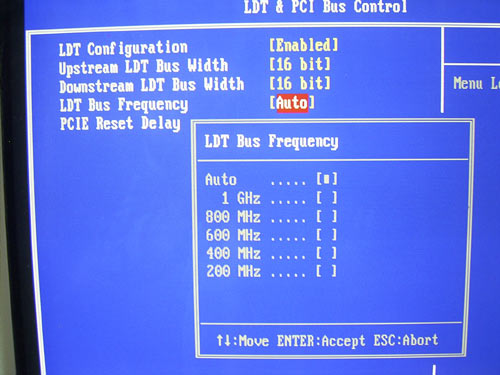
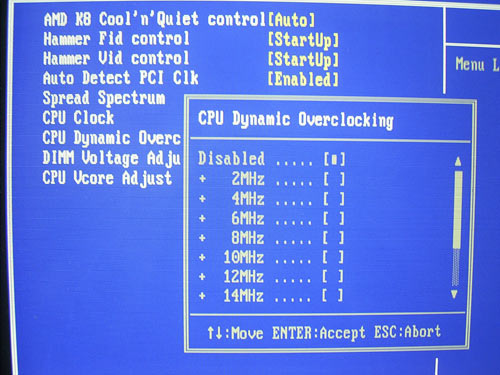
Разгон и стабильностьРассмотрим преобразователь питания. Он имеет 3-х фазную схему, в которой установлены шесть конденсаторов емкостью 1800 мкФ и 3 емкостью 1500 мкФ. Теперь переходим к рассмотрению функций разгона: Во-первых, плата ECS RD480-A939 позволяет изменять частоту HTT в диапазоне от 200 Мгц до 500 Мгц с шагом 1 Мгц. Следующий пункт - функция изменения множителя процессора. Диапазон изменения от 4 до 12 (максимум для модели 4800+) с шагом 1. Впрочем, полезность данной функции весьма сомнительна, поскольку все процессоры Athlon64 имеют заблокированный множитель в сторону увеличения. Следующий пункт - изменение напряжения на процессоре (Vcore) в диапазоне от 0,825 В до 1,55 В с шагом 0,025 В. Кроме того, с помощью отдельного параметра можно повысить напряжение на процессоре (Vcore) на 0,175 В с шагом 0,025 В. Далее - у пользователя есть возможность повышения напряжения на памяти. Диапазон изменения Vmem от 2,6 В до 3,0 В с шагом 0,05-0,1 В. Еще одна полезная функция предназначена для изменения множителя шины HyperTransport: Дело в том, что при увеличении опорной частоты HT для сохранения стабильности работы, результирующая частота HT должна быть в районе 1 Ггц. В результате, при увеличении HTT до 250 Мгц мы вынуждены снизить множитель HT до 4 (при установке HTT в районе 300 Мгц, множитель = 3). Этот тонкий момент многие пользователи не учитывают, и сталкиваются с проблемами при разгоне. Кстати, не стоит бояться низкого множителя HT, так как его влияние на общую производительности - минимально. Если пользователь планирует задействовать функцию динамического разгона, то множитель шины HT нужно понизить заблаговременно. Кстати, динамический разгон осуществляется увеличением HTT в диапазоне от 2 Мгц до 30 Мгц с шагом 2 Мгц. Теперь переходим к практическому разгону. Плата показала весьма слабые результаты: стабильная работа на частотах не более 250 Мгц.
Теги:
Комментарии посетителей
Комментарии отключены. С вопросами по статьям обращайтесь в форум.
|
|